Надлежащая тригонометрия для вращения точки вокруг источника
Любой из ниже подходов используют корректную математику для вращения точки? Если так, какой корректен?
POINT rotate_point(float cx,float cy,float angle,POINT p)
{
float s = sin(angle);
float c = cos(angle);
// translate point back to origin:
p.x -= cx;
p.y -= cy;
// Which One Is Correct:
// This?
float xnew = p.x * c - p.y * s;
float ynew = p.x * s + p.y * c;
// Or This?
float xnew = p.x * c + p.y * s;
float ynew = -p.x * s + p.y * c;
// translate point back:
p.x = xnew + cx;
p.y = ynew + cy;
}
15
задан Joshua 2 July 2010 в 00:57
поделиться
3 ответа
Это зависит от того, как вы определяете угол . Если он измеряется против часовой стрелки (что является математическим условием), то правильное вращение - ваше первое:
// This?
float xnew = p.x * c - p.y * s;
float ynew = p.x * s + p.y * c;
Но если оно измеряется по часовой стрелке, то второе правильное:
// Or This?
float xnew = p.x * c + p.y * s;
float ynew = -p.x * s + p.y * c;
23
ответ дан 1 December 2019 в 00:16
поделиться
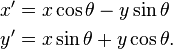
Выполнить вращение с использованием матриц, точка (x, y), которая должна быть повернута, записывается как вектор, затем умножается на матрицу, вычисляемую по углу θ, например:

где (x ', y') - ко- ординаты точки после вращения, а формулы для x ′ и y ′ можно увидеть как
28
ответ дан 1 December 2019 в 00:16
поделиться
Это извлечено из моей собственной библиотеки векторов...
//----------------------------------------------------------------------------------
// Returns clockwise-rotated vector, using given angle and centered at vector
//----------------------------------------------------------------------------------
CVector2D CVector2D::RotateVector(float fThetaRadian, const CVector2D& vector) const
{
// Basically still similar operation with rotation on origin
// except we treat given rotation center (vector) as our origin now
float fNewX = this->X - vector.X;
float fNewY = this->Y - vector.Y;
CVector2D vectorRes( cosf(fThetaRadian)* fNewX - sinf(fThetaRadian)* fNewY,
sinf(fThetaRadian)* fNewX + cosf(fThetaRadian)* fNewY);
vectorRes += vector;
return vectorRes;
}
1
ответ дан 1 December 2019 в 00:16
поделиться
Другие вопросы по тегам: